 por
por Hoy en día los conductores de vehículos, aún si no tienen un sistema de navegación GPS integrado en su vehículo, dispone de uno gracias a su smartphone. Un sistema que para ponerlo en su justo lugar es uno de los avances tecnológicos más útiles y más utilizados hoy en día.
Los orígenes de los navegadores GPS, contrariamente a lo que muchos creen no es reciente, sus orígenes se remontan a 1909, año en que el norteamericano J.W. Jones inventó el primer asistente para la lectura de rutas en carretera.
Otro de los predecesores del actual sistema de navegación GPS es el Auto Mapa de Antonio Martín Santos, oriundo de León, en España, el primer navegador portátil que este año cumple 65 años desde su creación y el cual será exhibido en Automobile Barcelona 2019, el cual se desarrollará en esa ciudad entre el 11 y el 19 de Mayo próximos.

A continuación los organizadores del evento en Barcelona nos cuentan los orígenes y la historia de los navegadores GPS, pero antes de seguir como prólogo señalan que la invención de los automóviles «aceleró esa necesidad de interpretar el territorio mediante la creación de una cartografía que facilitase los movimientos a cualquier viajero. Brújula y mapa, los útiles más habituales de más larga duración utilizados para ayudarnos a orientarnos y ubicarnos, fueron evolucionando al ritmo de los progresos científicos hasta fusionarse e integrarse en los dispositivos de navegación por geolocalización (GPS) que disfrutamos en la actualidad«.
1909 – Jones Live Map (EEUU), el ancestro de los navegadores
Las hemerotecas sitúan al norteamericano J.W. Jones como el primer inventor de un asistente para la lectura de rutas en carretera. En 1909, coincidiendo con la inauguración de las carreras de Indianápolis y aprovechando la comercialización de velocímetros deportivos, recogió la inquietud de multitud de conductores de combinar la lectura de mapas para orientarse y la conducción al mismo tiempo. La materialización de aquella preocupación fue el Jones Live Map, un dispositivo conectado al engranaje del cuentakilómetros del coche que contenía una serie de discos de papel con información codificada de forma radial sobre una ruta entre dos puntos. El conductor escogía el disco con la ruta a seguir que disponía en su momento de arranque -posición- con la correspondiente a 180º de la circunferencia. El movimiento del velocímetro accionaba los engranajes del Live Map que, en sentido de giro horario, iba mostrando los datos del disco al conductor. Cada disco cubría 100 millas y la información contenía el tipo de carretera, posición e indicaciones de giros. El invento contó con una buena aceptación, pero la rapidísima evolución de las infraestructuras hizo inviable una pronta actualización de los discos-mapas y el Jones Live Map cayó en el olvido en los años 20.
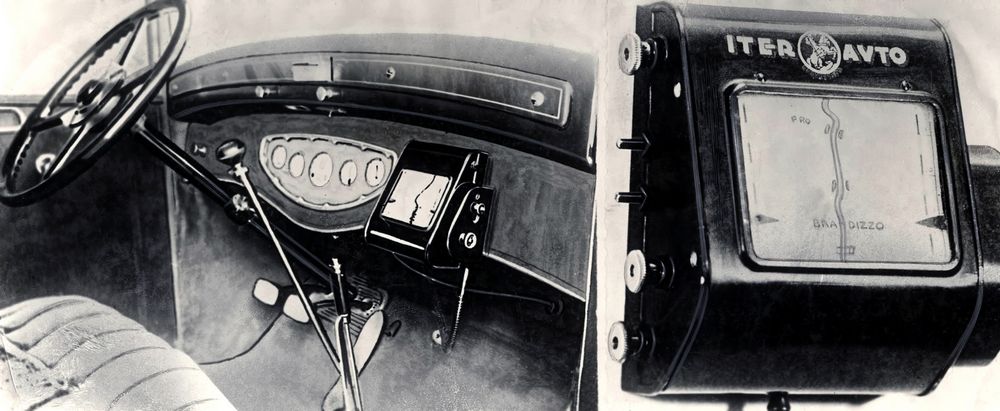
1930 – Iter Avto (Italia), pionero en la utilización de cartografía
Era un dispositivo creado en Italia y operativo durante la década de los 30 del siglo pasado. Concebido como una evolución de los rutómetros que los copilotos utilizaban en pruebas como la Mille Miglia, iba instalado en el tablier del vehículo conteniendo un conjunto de mapas de papel que iban mostrándose a través de la pantalla del aparato. Estos mapas iban enrollados y un cable conectado al velocímetro regulaba el mecanismo interno del Iter Avto encargado de mostrarlos. La situación aparecía de forma proporcional a la velocidad de marcha. El inconveniente radicaba en la necesidad de volver a cargar los mapas cuando estos se agotaban y en determinar la ubicación exacta cuando el conductor se desviaba de la ruta.
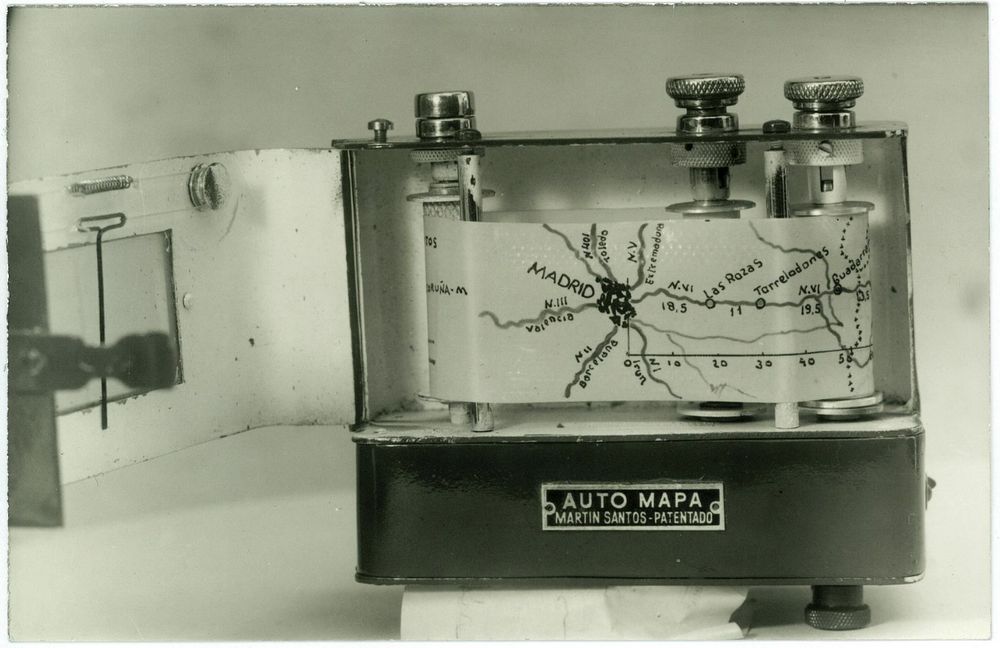
1954 – Auto Mapa (España), el primer navegador portátil
Obra del leonés Antonio Martín Santos, el funcionamiento del Auto Mapa seguía un similar funcionamiento del Iter Avto, pero con las particularidades de que el dispositivo del inventor español era portátil y el avance de los rutómetros podía detenerse a voluntad del conductor. El sistema, patentado en once países europeos, obtuvo la medalla de oro en el VI Salón Internacional de Inventores de Bruselas (1957). Diversas marcas de vehículos se interesaron por el proyecto, pero la repentina muerte de su inventor (1961) llevó el Auto Mapa al ostracismo.
1964 – Ford Aurora Concept (EEUU), marcando el futuro
La presentación de este sistema puede considerarse la primera interpretación de uso civil derivada de los primeros avances significativos en sistemas de geolocalización y digitalización de mapas por parte de servicios públicos canadienses como el Departamento de Desarrollo Rural promovidos por Roger Tomlinson (1962) y organismos como el departamento de Defensa y la Nasa en EEUU, también por esas fechas. Ford tuvo la premonición de que los automóviles acabarían por incorporar de forma masiva sistemas de navegación como asistentes a la conducción. Su propuesta se vio en el Salón de Detroit de 1964 a través del precioso y futurista -para la época- concept Aurora. Entre las diversas soluciones para mejorar la funcionalidad del habitáculo y la calidad de vida a bordo, figuraba un navegador integrado en el salpicadero cuya cartografía se adecuaba a la marcha. El dispositivo, una evolución mejorada y combinada de los sistemas Inter Avto y Auto Mapa, contaba con un puntero que señalaba la posición exacta sobre el mapa. No llegó a comercializarse, pero si marcó el camino en el desarrollo de los navegadores.
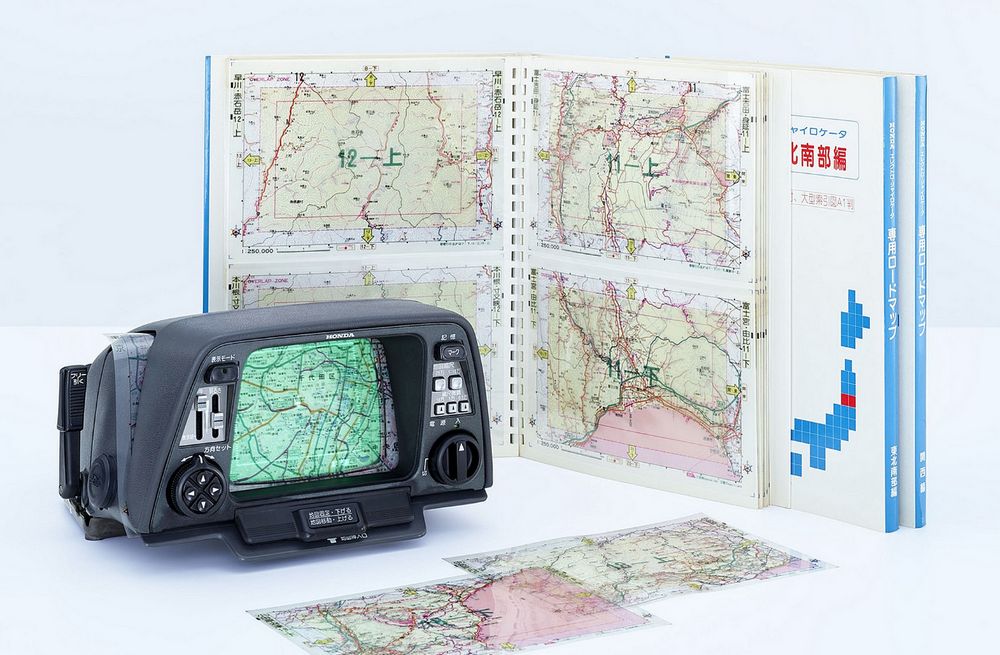
1981 – Honda Electro Gyrocator (Japón), irrumpe la electrónica
En plena efervescencia de gadgets electrónicos para el gran consumo -nacimiento de los compact-disc, por ejemplo-, Honda presentó en 1981 el Electro Gyrocator, que puede considerarse el primer navegador al uso de la historia de la automoción. Aún no había llegado el GPS (Global Positioning System) que conocemos para uso civil y el Gyrocator se basaba en un sistema de navegación inercial. Constaba de una brújula electrónica y de un sofisticado sensor de gas helio asociado a un giroscopio que detectaba los cambios de trayectoria del coche. Los cálculos de distancias se reconocían mediante un mecanismo acoplado a la transmisión. El conjunto de la información era analizado por un ordenador que posicionaba el vehículo sobre los mapas microfilmados mostrados a través de una pantalla de fósforo. Sobre ellos, un puntero electrónico marcaba la ubicación exacta. Los mapas iban relevándose conforme las necesidades de la ruta.
1985 – Etak Navigator (EEUU), llegan los mapas digitales
El sistema desarrollado en el estado de California era en esencia un ordenador portátil (constaba de un chip Intel 8088, memoria RAM de 256 kb y modulo EPROM de 32 kb) con un monitor CRT basado en vectores, parecido al de los osciloscopios. El almacenamiento de los mapas era por soporte magnético, cassettes cuyas cintas podían guardar un máximo de 3,5 MB de datos, una capacidad insuficiente que obligaba a ir cargado de cintas. Por ejemplo, sólo el área de la bahía de San Francisco demandaba seis unidades. Aun así, el Etak Navigator puede considerarse un navegador adelantado a su época; sus creadores fijaron el punto de vista centrado del coche sobre el mapa, principio que mantienen los actuales GPS. Este equipo gozó de una notable popularidad y se servia como un accesorio en los servicios post venta de las marcas.

1987 – Toyota CD-ROM (Japón), almacenamiento masivo y color
La firma japonesa de automóviles Toyota es la promotora de dos mejoras sustanciales en la tecnología de la navegación: la introducción de los CD-ROM como sistema directo de almacenamiento masivo de la información y la presentación del primer monitor con pantalla a color. El Toyota Crown Royal, exclusivo para el mercado japonés, fue el vehículo escogido para la ocasión.
1990 – Mazda Eunos Cosmos Navigation (Japón), nace el navegador GPS
La electrónica de consumo invade todos los ámbitos de la sociedad y el mercado de los sistemas de navegación para automóviles es ya un objetivo fijado en todas las marcas. Los sistemas de información geográfica para ordenadores como Mapinfo o Autodesk van consolidándose y dejan de ser exclusivamente una aplicación de uso militar y de investigación. En este contexto de revolución digital, Mazda introdujo el primer sistema de navegación en un automóvil en tiempo real por triangulación de satélites situados en el espacio. El equipo fue presentado en la berlina Eunos Cosmos.

1992 – GM GuideStar (EEUU), la réplica norteamericana
La réplica a las propuestas provenientes del Japón por parte de la industria norteamericana del automóvil provino de General Motor, que presentó un sistema de navegación gps integrado en el vehículo denominado Onis. Inicialmente fue introducido en la flota de vehículos de alquiler Avis en Florida en 1992. Tres años más tarde, se proponía como un elemento opcional en los sedán Oldsmobile Serie 88. De forma más extendida en la red de GM adoptó el nombre de GuidaStar, inicialmente con cartografía de California y Las Vegas.
1997 – Alpine CVA-1005 (Japón), el primer equipo multimarca
Esta firma japonesa, que ya había colaborado con Honda en el desarrollo de su sistema de navegación y, posteriormente, seria proveedor casi exclusivo de BMW, ofreció al mercado el primer equipo portátil de navegación basado en el posicionamiento satelital (gps). Seguía recurriendo a los CD como sistema de almacenamiento y cualquier usuario podía incorporarlo a su vehículo.
1998 – Early Garmin StreetPilot (EEUU), el gps portátil
La compañía norteamericana Garmin, referente en equipos móviles de geolocalización, fue la primera en ofrecer un dispositivo verdaderamente portátil y adaptable a cualquier ámbito de la automoción. Debido a que el gobierno de EEUU no liberó completamente hasta el año 2000 todo el potencial del sistema GPS para uso civil, la funcionalidad del StreetPilot no fue completa. Pero el dispositivo, con pantalla en blanco y negro, supuso un progreso enorme en términos de usabilidad -compacto y funcional- y capacidad de memoria.
Desde entonces, la tecnología de la navegación gps ha evolucionado exponencialmente con el paso de los años, siendo 2005 una fecha clave en la movilidad y perfeccionamiento de la navegación satelital. Hasta ese momento, los especialistas trabajan en la digitalización de los mapas de carretera en papel, que pronto quedaban desfasados ante los cambios y mejoras constantes de las infraestructuras viarias y servicios asociados al conductor. Los trabajos de OpenstreetMap y DigitalGlobe, cuna de Google Maps, sentaron las bases para que cualquier usuario pudiera encontrar la ruta más corta entre dos puntos. En años sucesivos, NavTeq y Tele Atlas, proveedora de mapas de Google Maps, destacarían en la digitalización cartográfica.
La estandarización de los smarphone hacia 2007-8 marca otro periodo clave para entender el desarrollo actual de los navegadores y la conducción predictiva. Los equipos de los automóviles y los navegadores web convergen en el camino de la geolocalización unificando bases de datos y aumentando el caudal de información y datos en tiempo real.
El desarrollo incesable de la conectividad y los progresos en la conducción autónoma servirán para optimizar más y mejor nuestros desplazamientos. Los cálculos en función de la densidad del tráfico, incidencias en las vías -accidentes, obras de mantenimiento, etc- regulaciones de velocidad ya son analizadas en tiempo real por los navegadores de reciente generación en aras de mejorar los desplazamientos. El proyecto DGT 3.0 es la propuesta de carácter público más reciente y ambiciosa en el estado español para crear una plataforma de movilidad inteligente en la que todos, en tanto que conductores, podemos formar parte.